


موتور DYNAMIXEL XM430-W210-T
| Item | Specifications |
|---|---|
| MCU | ARM CORTEX-M3 (72 [MHz], 32Bit) |
| Position Sensor | Contactless absolute encoder (12Bit, 360 [°]) Maker : ams(www.ams.com), Part No : AS5045 |
| Motor | Coreless |
| Baud Rate | 9,600 [bps] ~ 4.5 [Mbps] |
| Control Algorithm | PID control |
| Resolution | 4096 [pulse/rev] |
| Backlash | 15 [arcmin] (0.25 [°]) |
| Operating Modes | Current Control Mode Velocity Control Mode Position Control Mode (0 ~ 360 [°]) Extended Position Control Mode (Multi-turn) Current-based Position Control Mode PWM Control Mode (Voltage Control Mode) |
| Weight | 82 [g] |
| Dimensions (W x H x D) | 28.5 x 46.5 x 34 [mm] |
| Gear Ratio | 212.6 : 1 |
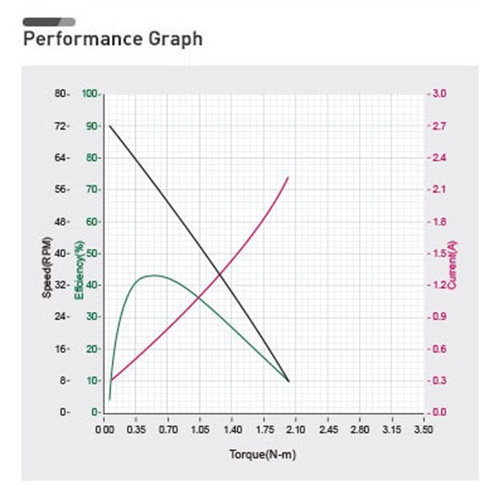
| Stall Torque | 2.7 [N.m] (at 11.1 [V], 2.1 [A]) 3.0 [N.m] (at 12.0 [V], 2.3 [A]) 3.7 [N.m] (at 14.8 [V], 2.7 [A]) |
| No Load Speed | 70 [rev/min] (at 11.1 [V]) 77 [rev/min] (at 12.0 [V]) 95 [rev/min] (at 14.8 [V]) |
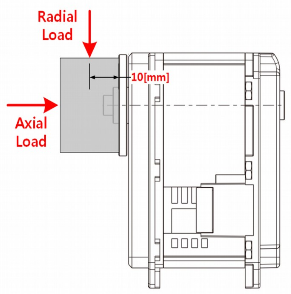
| Radial Load | 40 [N] (10 [mm] away from the horn) |
| Axial Load | 20 [N] |
| Operating Temperature | -5 ~ +80 [°C] |
| Input Voltage | 10.0 ~ 14.8 [V] (Recommended : 12.0 [V]) |
| Command Signal | Digital Packet |
| Physical Connection | RS485 / TTL Multidrop Bus TTL Half Duplex Asynchronous Serial Communication with 8bit, 1stop, No Parity RS485 Asynchronous Serial Communication with 8bit, 1stop, No Parity |
| ID | 253 ID (0 ~ 252) |
| Feedback | Position, Velocity, Current, Realtime tick, Trajectory, Temperature, Input Voltage, etc |
| Case Material | Metal (Front, Middle), Engineering Plastic (Back) |
| Gear Material | Full Metal Gear |
| Standby Current | 40 [mA] |
موتورهای DYNAMIXEL X، سری جدید از موتورهای هوشمند و محبوب داینامیکسل محصول شرکت روباتیس است.
این عملگرهای شبکهای به علت برخورداری از قدرت و دقت بالا و بهرهگیری از الگوریتمهای کنترلی بروز در انجام بسیاری از پروژههای رباتیک متفاوت نظیر رباتهای چند مفصلی، رباتهای انسان نما، بازوهای رباتیک و … کاربرد زیادی دارند.

{kind=link}